fischertechnik-computing-Ecke
Hier findest Du Informationen über meine fischertechnik-computing-Basteleien.Falls Du fischertechnik nicht kennst, ...
... hier eine kurze Beschreibung:fischertechnik ist ein technisch orientiertes Baukastensystem. Da gibt es z. B. Motoren, Luftdruckzylinder, Getriebeteile und vieles andere mehr. Im Gegensatz zu LEGO gibt es bei fischertechnik nicht so viele Teile, die nur der „Verzierung“ eines Modells dienen. Fast jedes fischertechnik-Teil hat auch einen technischen Sinn, daher sind die Modelle, die man mit fischertechnik bauen kann, zwar nicht so schön, aber dafür technisch anspruchsvoller.
Bei fischertechnik werden die Bausteine weniger „zusammensteckt“ sondern eher „ineinandergeschoben“. Dies geschieht mittels Köpfen, die in Nuten hineingeschoben werden. Dadurch ist es möglich, einen einzelnen Baustein in einem Modell auch mal um einen halben Millimeter zu verschieben. Aus diesem Grund kann man mit fischertechnik sehr exakte Modelle bauen.
Schon seit den frühen 1980er Jahren gibt es bei fischertechnik die Möglichkeit, Modelle mittels Computer zu steuern. Dies geschieht mit einem fischertechnik computing Interface, das die Verbindung zwischen Modell und Computer ist. Genau solche computergesteuerten Modelle sind ein Hobby von mir.
Die computing Interfaces
Ich verwende zwei recht alte fischertechnik Parallelport-Interfaces im Master-Slave-Betrieb.
Diese Interfaces wurden Ende der 1980er bis Mitte der 1990er Jahre verkauft, zuerst unter dem Namen „fischertechnik Interface“ und später unter dem Namen „fischertechnik Universal Interface“. Die Hardware der beiden Interfaces ist aber identisch. Der Anschluss dieser Interfaces an den Computer erfolgt über den Parallelport. Mittlerweile wurden beide Interfaces vom Markt genommen und mehrfach durch neuere und modernere Versionen ersetzt. Die heutigen Interfaces von fischertechnik werden daher auch nicht mehr an den Parallelport angeschlossen sondern per USB mit dem Computer verbunden.
|
Die Parallelport-Interfaces wurden damals vom Hersteller so konstruiert, dass diese an möglichst viele verschiedene Computersysteme angeschlossen werden können. Deswegen braucht man zum Anschluss an den Computer noch eine passende Adapterplatine. Es gibt Adapterplatinen für den IBM-PC, Amiga, Commodore C64/C128, Schneider CPC, Atari ST und Apple II. Da ich meine Interfaces an einem PC verwende, nutze ich die Adapterplatine für IBM-PCs. Zu den Parallelport-Interfaces, die ich nutze, gab es auch Vorläufer-Modelle, für die keine Adapter-Platine erforderlich war. Diese wurden ohne Adapterplatine direkt an den Parallelport des Computers angeschlossen. Allerdings gab es dann auch für die verschiedenen Computersysteme unterschiedliche Interfaces. |
Adapterplatine für IBM-PCs
|
Man kann auch zwei Parallelport-Interfaces an einen Computer anschließen, was man dann „Master-Slave-Betrieb“ nennt. Das erste Interface (Master-Interface) wird dabei mittels der Adapterplatine mit dem Computer verbunden. Das zweite (Slave-Interface) wird ohne Adapterplatine an das Master-Interface angeschlossen (an den Slave-Anschluss). Dadurch wird am Computer nur ein Parallelport belegt. Mit zwei Interfaces kann man die doppelte Anzahl von Motoren und Schaltern anschließen, so dass man größere Modelle oder zwei kleinere Modelle gleichzeitig mit dem Computer steuern kann.
Der Master-Slave-Betrieb ist allerdings nur mit solchen Parallelport-Interfaces von fischertechnik möglich, die einen Slave-Anschluss besitzen. Die Interfaces, die ich nutze, haben jeweils einen Slave-Anschluss - bei den Vorläufer-Modellen war allerdings kein Slave-Anschluss vorhanden.
Als ich meine beiden Interfaces an den Computer angeschlossen habe, ergab sich ein ganz netter Kabelsalat. Um zumindest die Kabel zwischen Adapterplatine, Master-Interface und Slave-Interface zu „bändigen“, habe ich ein Gehäuse gebaut, das die beiden Interfaces, die Adapterplatine und alle Kabel dazwischen aufnimmt. Das Gehäuse selbst besteht ganz stilecht aus fischertechnik-Bauteilen.
-
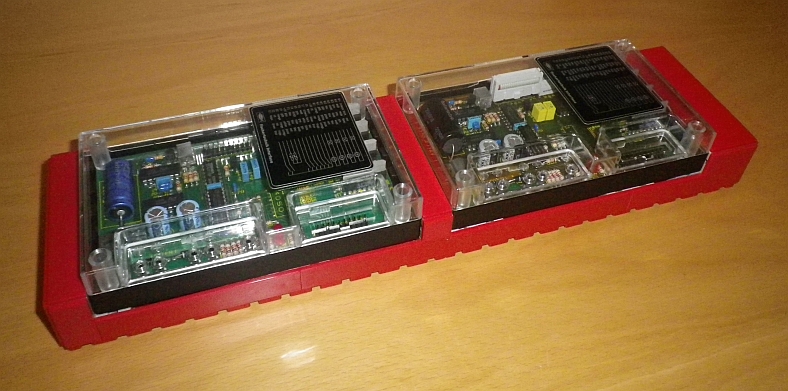
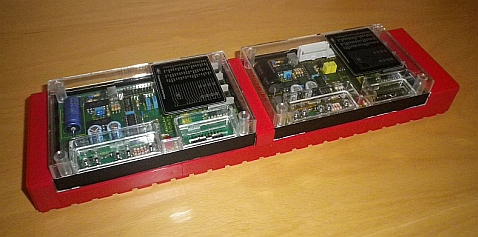 Interfaces mit Gehäuse
Interfaces mit Gehäuse -
 Seitenansicht mit dem Computer-Anschluss
Seitenansicht mit dem Computer-Anschluss -
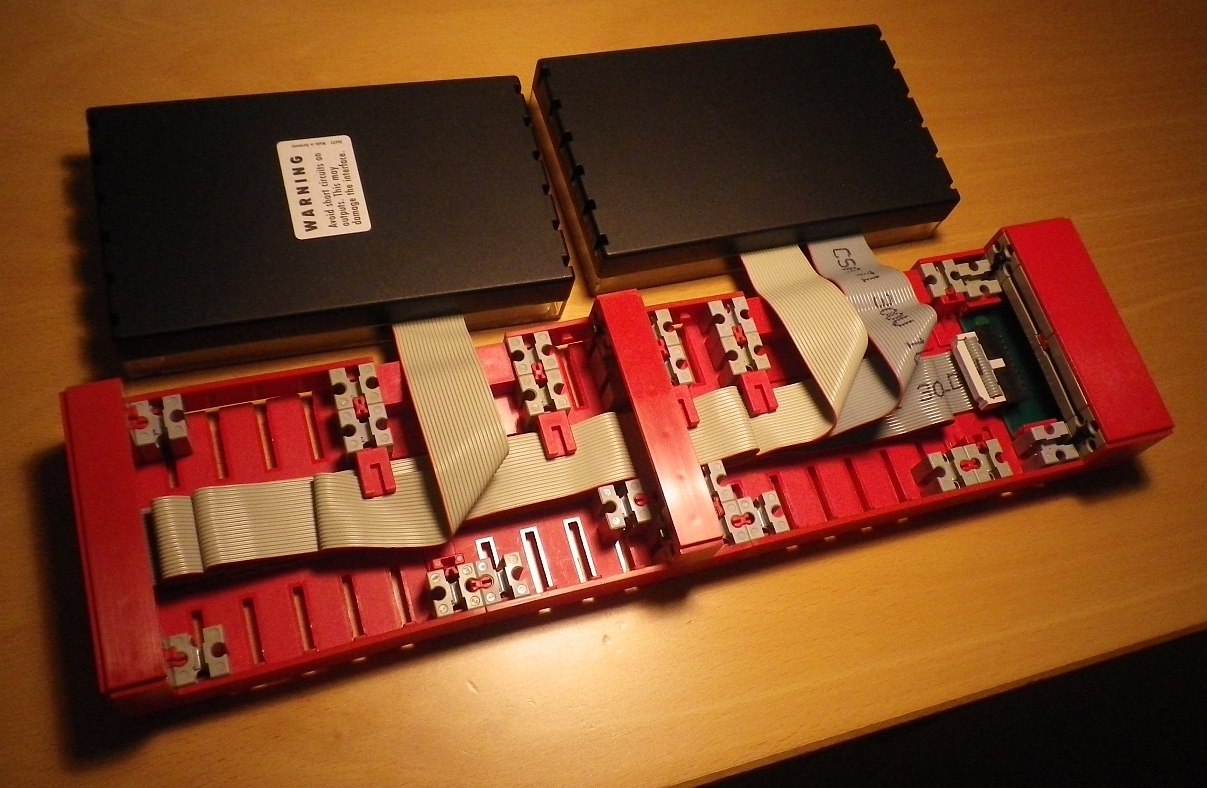
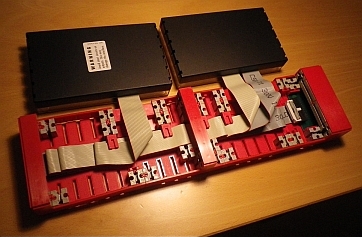 Innenansicht, rechts befindet sich die Adapterplatine
Innenansicht, rechts befindet sich die Adapterplatine

Das 5V / 3,3V-Problem
Die beiden fischertechnik Parallelport-Interfaces, die ich verwende, sind vom Hersteller für einen Signalpegel von 5V konzipiert worden. Heutige PCs laufen auf 3,3V-Basis. Dies bedeutet, dass bei heutigen Parallelports ein High-Signal nicht mehr 5V Spannung hat, sondern nur 3,3V. Bei den Parallelport-Interfaces führt dies dazu, dass die sog. Sicherheitsschaltung versagt, die bei einem korrekt übertragenen Befehl vom Computer die Motorausgänge aktivieren, d. h. durchschalten, sollte. Die Folge ist, dass man die Eingange der Interfaces lesen und die Motorausgänge schreiben kann, jedoch die Motoren nie loslaufen.
Für dieses Problem gibt es mehrere Möglichkeiten, es zu lösen. Die eleganteste Lösung ist der Einbau jeweils eines zusätzlichen 47kΩ-Widerstands (0,25 Watt) in die beiden Parallelport-Interfaces (Master-Interface und Slave-Interface). Auf diese Idee ist mein ehemaliger Arbeitskollege Torsten Lutter gekommen, der ein echter Profi in Sachen Elektronik ist. An dieser Stelle ein großes Dankeschön an ihn!
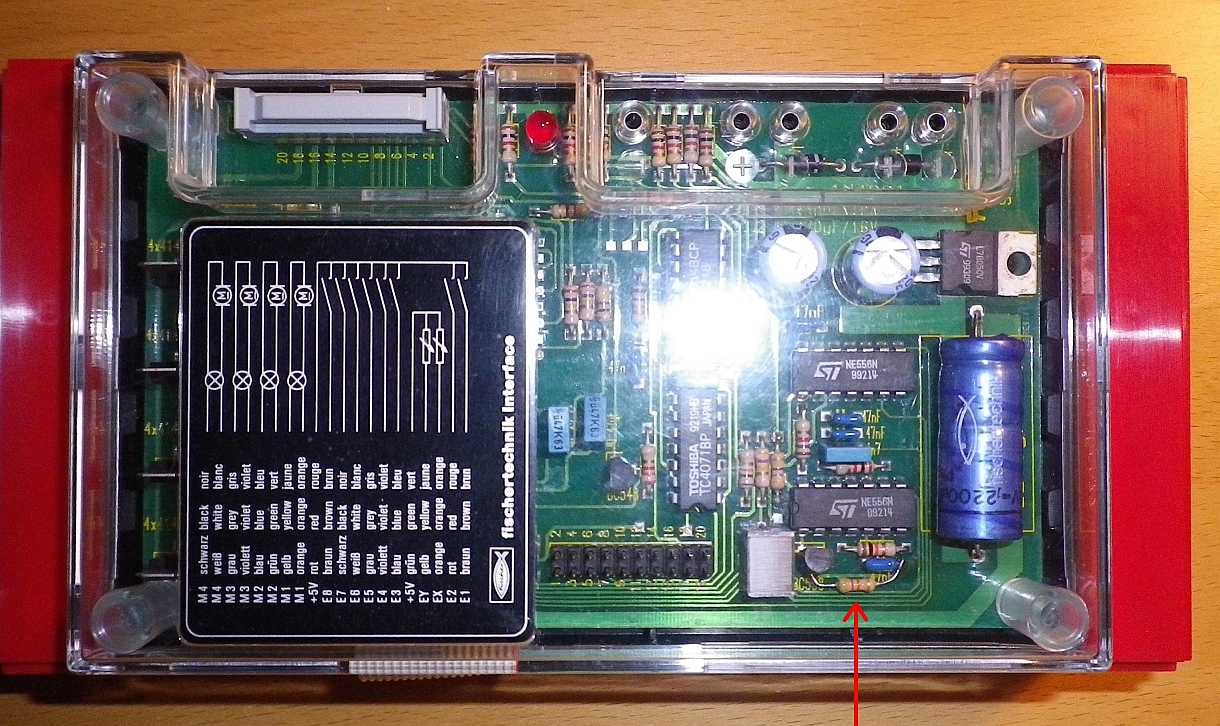
Im folgenden Foto kann man die Position des zusätzlichen Widerstandes im Interface erkennen (roter Pfeil, zum Vergrößern einfach draufklicken). Der linke Kontakt des Widerstandes ist mit dem mittleren Kontakt des Transistors verbunden (Aufdruck auf Platine: „BC558“). Der rechte Kontakt des Widerstandes ist mit dem rechten Kontakt des Kondensators verbunden (Aufdruck auf Platine: „47nF“).
-
 Zusätzlicher 47kΩ-Widerstand im Interface
Zusätzlicher 47kΩ-Widerstand im Interface
Diese Modifikation mit dem zusätzlichen Widerstand kann gerne nachgebaut werden, aber nur auf eigene Gefahr! Bei meinen Interfaces hat die Modifikation bestens funktioniert, jedoch kann ich nicht garantieren, ob dies bei anderen fischertechnik Parallelport-Interfaces (die ggf. von einer anderen Baureihe sind) auch so ist!
Die Treiber-Software
Zur Ansteuerung der fischertechnik Interfaces habe ich eine Software namens „FTToolbox“ geschrieben. Diese Software beinhaltet eine .NET-Klassenbibliothek (.NET-Framework Version 2.0), mit der die Motorausgänge der Interfaces geschaltet werden können und die Eingänge der Interfaces eingelesen werden können.
Die FTToolbox ist bei nicht-kommerzieller Nutzung FREEWARE. Im Download-Bereich kann sie heruntergeladen werden. Dort kann man auch das Handbuch der FTToolbox herunterladen, wo weitere Informationen zu der Software stehen.
-
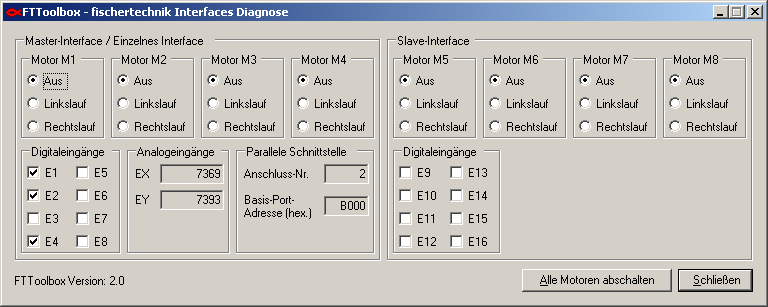 Screenshot des Diagnose-Tools der FTToolbox
Screenshot des Diagnose-Tools der FTToolbox
CD-/DVD-Beschriftungsgerät
Habt Ihr wie ich eine unheilbar unleserliche Handschrift? Und findet Ihr auch, dass CDs, die man von Hand beschriftet hat, nicht schön aussehen?
Hier ist eine Möglichkeit, wie man CDs und DVDs leserlich beschriftet, ohne einen Kalligraphie-Kurs belegen zu müssen:
-
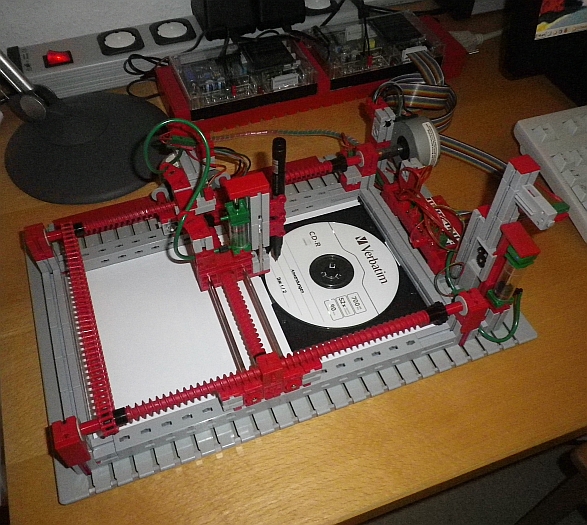 CD-/DVD-Beschriftungsgerät aus fischertechnik - Vorderseite
CD-/DVD-Beschriftungsgerät aus fischertechnik - Vorderseite -
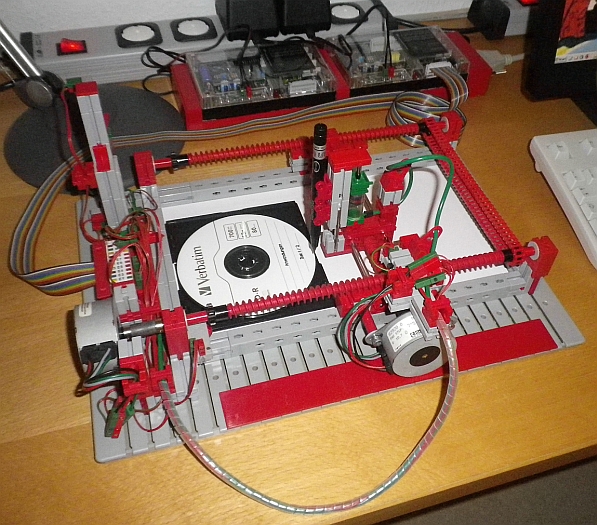 CD-/DVD-Beschriftungsgerät aus fischertechnik - Rückseite
CD-/DVD-Beschriftungsgerät aus fischertechnik - Rückseite
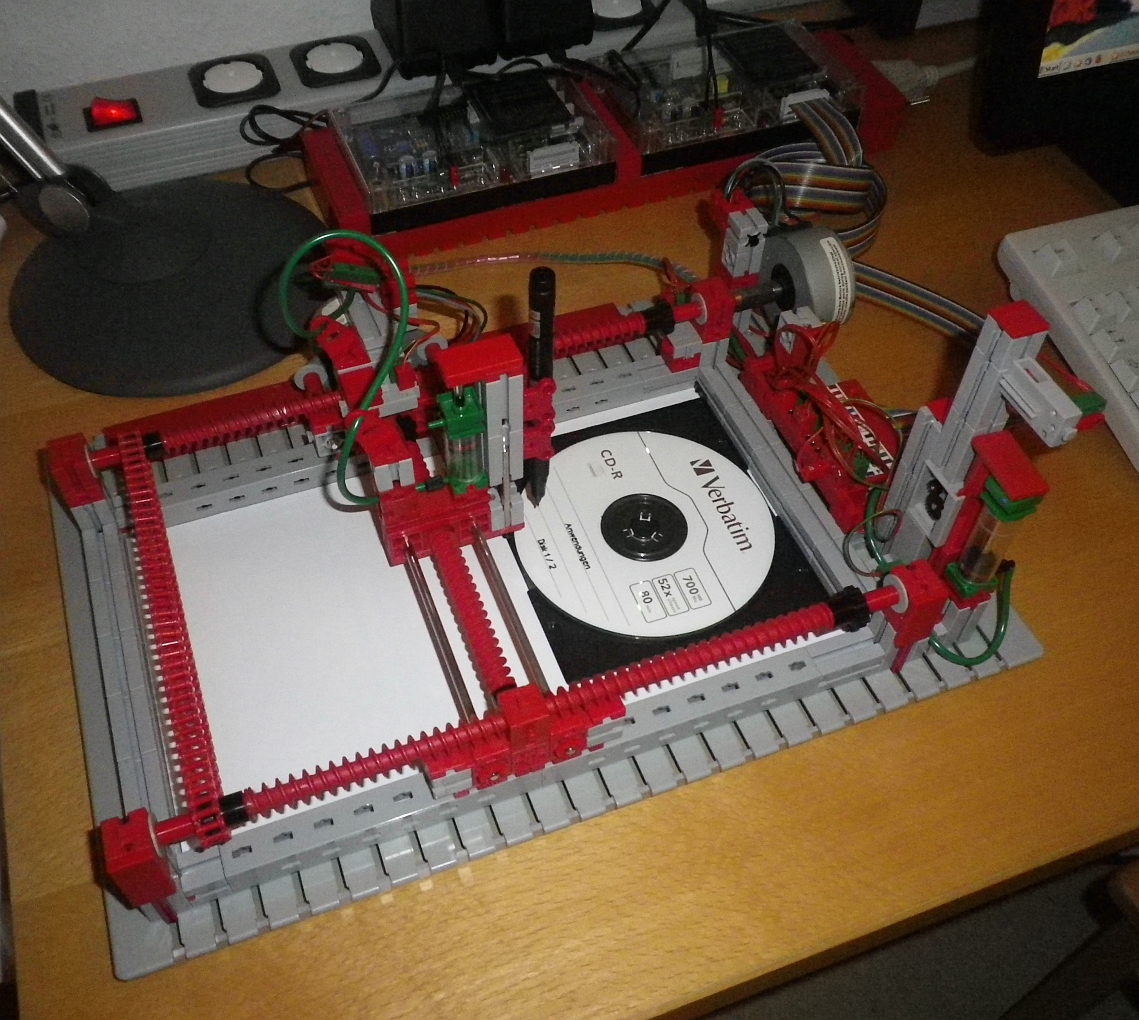
Die beiden Achsen des CD-/DVD-Beschriftungsgerätes werden jeweils über einen Schrittmotor betrieben.
Das Heben und Senken des Stiftes ist mit einem Hydraulik-Zylinder-Paar realisiert, wobei die Zylinder nicht mit Flüssigkeit gefüllt sind, sondern mit Luft. Der Wirkzylinder wird durch einen Mini-Motor mit Hubgetriebe bewegt. Da Wirkzylinder, Minimotor und das Hubgetriebe am Rand des Modells montiert sind (im linken Bild rechts zu sehen), füllt der Druckkopf mit dem Presszylinder sehr klein aus.
Der Halter für die CDs/DVDs ist einfach das Unterteil eines CD-Slimcases.
Das Beschriftungs-Ergebnis kann sich im Gegensatz zu meiner Handschrift sehen lassen:
-
 Beschriftete CD
Beschriftete CD

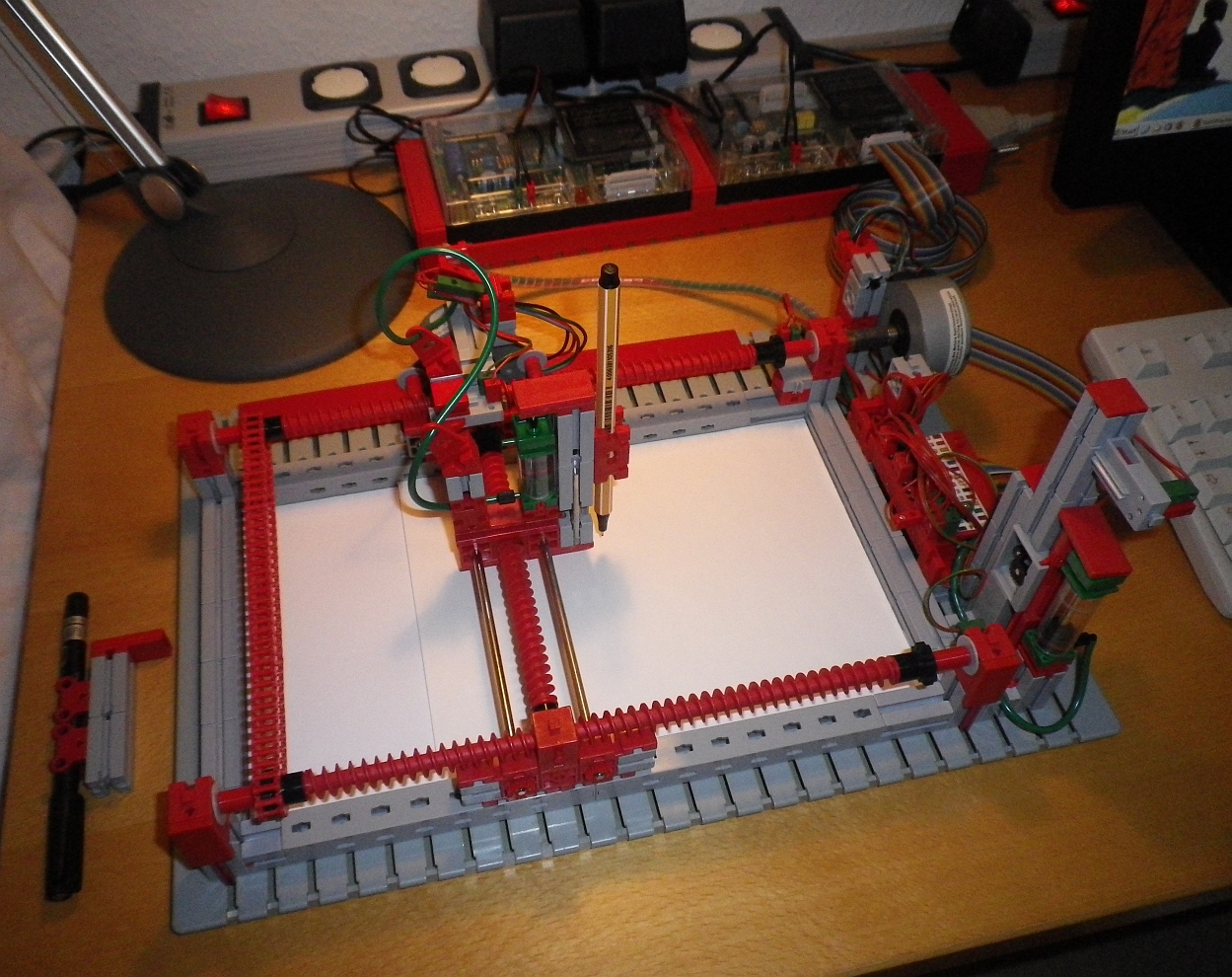
Das CD-/DVD-Beschriftungsgerät kann auch als Plotter verwendet werden. Dazu muss nur der CD-/DVD-Halter durch einen DIN-A5-Block ersetzt und der Stift ausgetauscht werden:
-
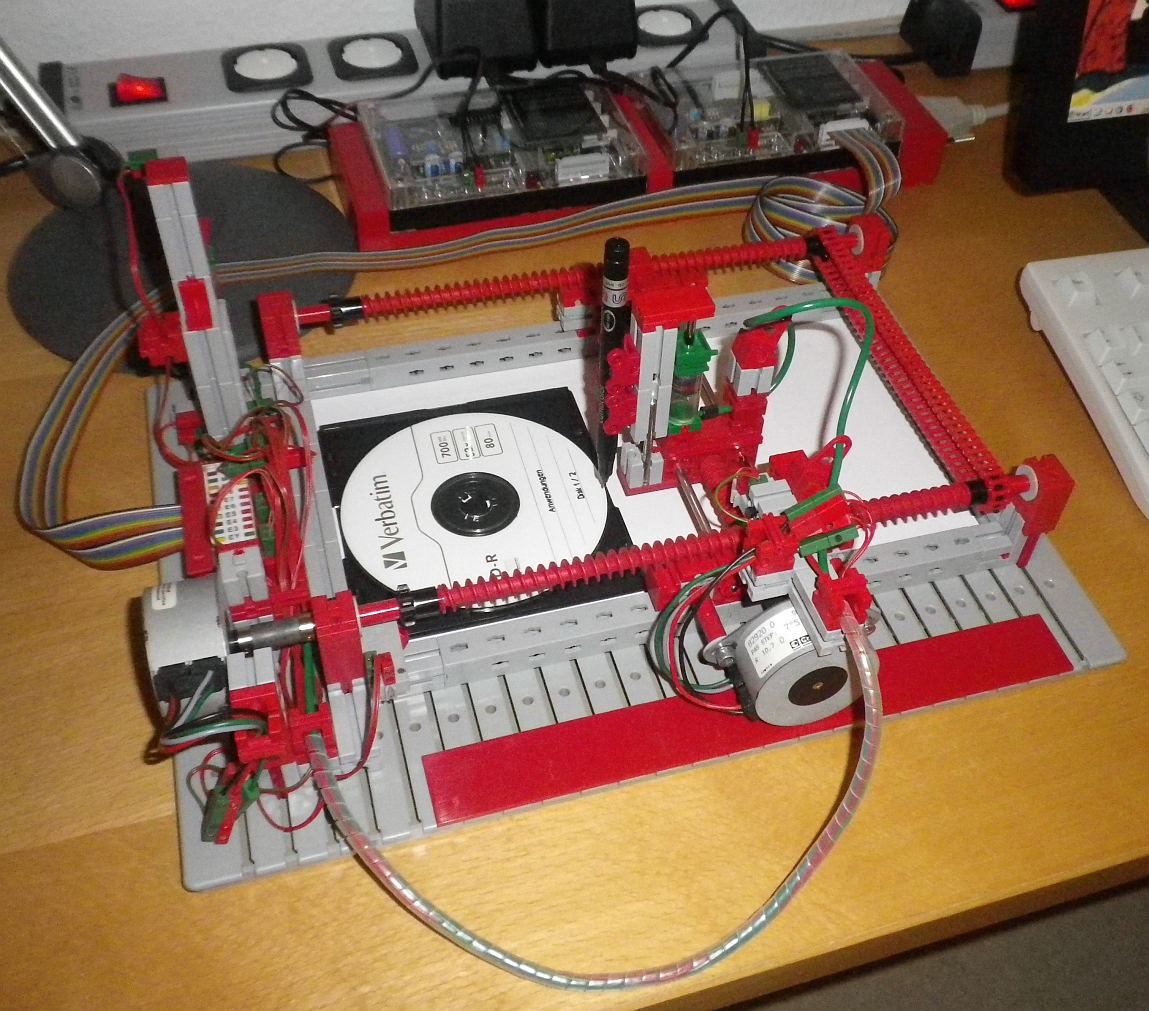
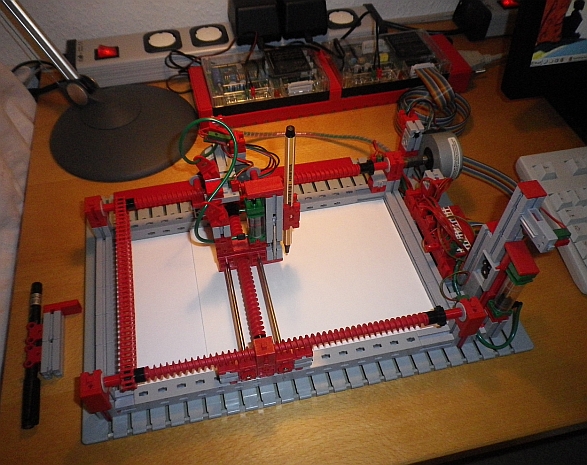 CD-/DVD-Beschriftungsgerät als Plotter, links neben dem Plotter liegt der Stift für die CDs/DVDs
CD-/DVD-Beschriftungsgerät als Plotter, links neben dem Plotter liegt der Stift für die CDs/DVDs